它首先要编制程序加以存储,然后再根据规定的程序,控制自动上下料机械手进行工作程序的存储方式有分离存储和集中存储两种。分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,桁架上下料机械手,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。
我国数控加工制造行业受益于国际振兴装备制造业的大环境,有了长足进展,数控机床上下料机械手的应用也被高度重视。
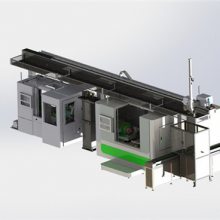
桁架机械手的机械动力生产介绍
桁架式上下料机械手实现上下料动作一般要经过如下过程:
1、桁架式上下料机械手的上料过程的动作:数控机械手臂沿X轴运动到工件取料位置的上方后停止,吉林桁架机械手,然后Z轴向下运动使张开的手爪刚好能抓住工件,闭合手爪抓住工件后,机床桁架机械手,使Z轴再向上运动到高度,然后再沿X轴方向运动到工作台卡盘正上方,然后Z轴向下运动把工件装入卡盘或工装内。
工业机器人负责整个生产过程,装载,夹紧和卸载,大大提高了工件的质量和外观。它改善了企业用于人工上下料的产品质量的不稳定性。
机器人的使用可以满足大批量生产的需要,降低劳动强度,减少工业事故,提高工作效率和产品质量。
还有就是维护方便,当机器人出现故障时,只需调整或更换维修机器人,但是不影响机器的正常工作。
目前,工业机器人和机械自动化设备正在被广泛使用。 未来的工业发展中,越来越多的企业会选择工业机器人。简而言之就是解决手动操作的复杂操作。