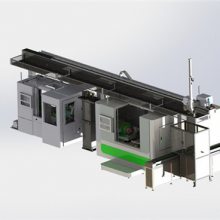
直接进入 仓库经过这个过程。 多线自动线采用模块化设计,按单机版或双机版桁架机器人标准单元无缝拼接连接,可完成多工位多工艺联动生产 。
多连杆桁架机械手采用完全模块化设计,结合了机器人主体,四川桁架机械手,多个立柱,机器人臂,横梁,桁架上下料机械手,轨迹,端爪,筒仓,控制柜,转台,工件检测站,工件主动物流系统等。 这些单元紧密集成,机床桁架机械手,然后形成无人操作的自动化加工线。
为了提高工作效率,人们研究了机械手进给机器人。 在机械手产品的生产和加工中,需要多个过程。 在从一个过程到下一个过程的过程中,车床桁架机械手,运输需要各种类型的传输装置。 如何快速准确地将机械手转移到工作站得到改进。
人体工程学和加工质量以及生产安全的关键,但机械手送料机器人仍然不完善,工作效率低,精度不足,体积庞大,灵活性差,不能满足多工位同步转移产品的加工要求。
1、桁架式上下料机械手的上料过程的动作:数控机械手臂沿X轴运动到工件取料位置的上方后停止,然后Z轴向下运动使张开的手爪刚好能抓住工件,闭合手爪抓住工件后,使Z轴再向上运动到高度,然后再沿X轴方向运动到工作台卡盘正上方,然后Z轴向下运动把工件装入卡盘或工装内。然后卡盘夹紧,Z轴上升到超出机床防护罩上方,X轴再运动到等待位置等待机床完成工件的加工。