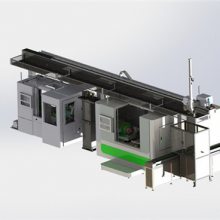
桁架式上下料机械手下料过程的动作:完成工件加工后,X轴运动到卡盘的正上方,Z轴向下运动使手爪刚好能抓住工件,然后给气压使手爪合并抓住工件,卡盘松开,Z轴向上运动到合适的高度,然后沿X轴方向运动直至Z轴到放料位置,Z轴下降到放料点,张开手爪放料完成后提升Z轴,车床桁架机械手,再转入下一个上料过程。以上动作安排的路径需要与桁架式机械手配套的上下料机构如料盘、卡盘等的位置在同一条直线上,这样才能满足机械臂做X-Z两维运动的要求。
根据不同的冲压生产工艺,冲压机的标准是不同的。一般分为:单冲冲压机械手,工业桁架机械手,机械手单冲冲床,冲床多冲床在线机械手。
单个推杆的方向,多工位冲压操作比较简单,个测试项目:
手臂之间的距离:更换模具,手臂之间的距离需求调整。调整方法:将数据放在升降机中,左臂吸盘的中心与数据中心对齐,并位于机器人吸盘右侧的中心模具中心。手动调节机器人的Z轴提升高度以调节相应传感器的方向。
机械手的速度:手动一步一步的运动,无论是相应的测试机器人行程,吸盘方向,Z轴高度,重型桁架机械手,调节机器人机械手的操作速度,没有规划,一般节奏4-8秒。
1、桁架式上下料机械手的上料过程的动作:数控机械手臂沿X轴运动到工件取料位置的上方后停止,然后Z轴向下运动使张开的手爪刚好能抓住工件,闭合手爪抓住工件后,使Z轴再向上运动到高度,然后再沿X轴方向运动到工作台卡盘正上方,西藏桁架机械手,然后Z轴向下运动把工件装入卡盘或工装内。然后卡盘夹紧,Z轴上升到超出机床防护罩上方,X轴再运动到等待位置等待机床完成工件的加工。